MAVlink (Pixhawk) Integration
The Mini allows you to read sensor data from your MAVlink-compatible flight controller such as Pixhawk. Moreover, it can detect whether the drone is airborne or grounded and act accordingly by starting/ending the flight on your device.
Connecting to the MAVlink Flight Controller
The prerequisite for interconnection of Dronetag device and flight controller is having the right cable. Please order interconnection cable on our e-shop or make sure that you have compatible one by hand. All the wiring must be as described below.
Dronetag Mini Extension Port
The connector on Dronetag Mini is common JST SH 4-pin with UART interface with no flow control.
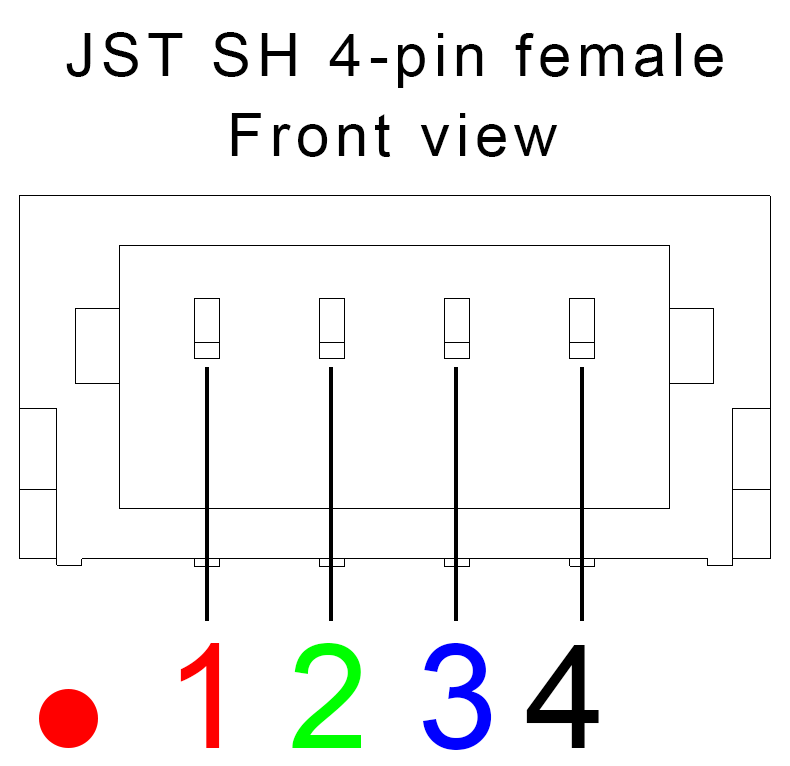
| Pin # | Name | Scheme Color | Description |
|---|---|---|---|
| 1 | VCC | Red | Do not connect to any voltage source |
| 2 | UART RX | Green | Receive of the Dronetag device (3.3V logic) |
| 3 | UART TX | Blue | Transmit of the Dronetag device (3.3V logic) |
| 4 | Ground | Black | Ground connection |
Pixhawk Telem Port
Most MAVlink-compatible flight controllers (such as Pixhawk) use JST GH 6-pin connectors that can be configured as UART/Serial interface.
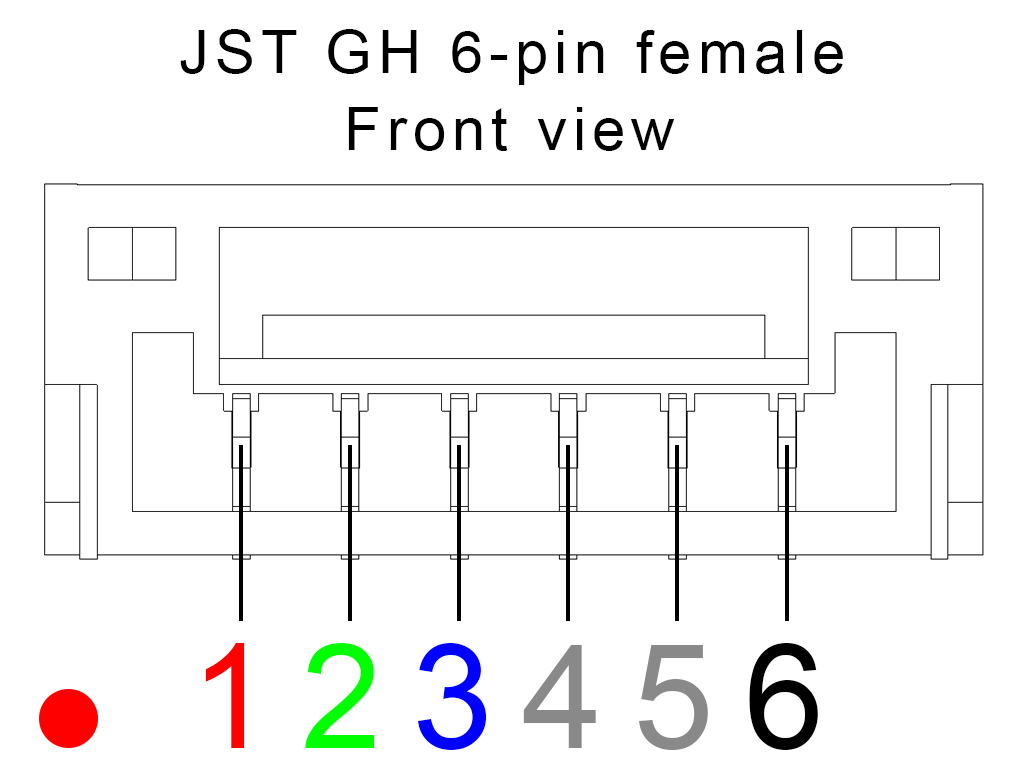
| Pin # | Name | Scheme Color | Description |
|---|---|---|---|
| 1 | VCC | Red | Supply from the flight controller (5V) |
| 2 | UART TX | Green | Transmit of the flight controller (3.3V to 5V logic) |
| 3 | UART RX | Blue | Receive of the flight controller (3.3V to 5V logic) |
| 4 | CTS | Gray | Flow control pin (3.3V to 5V logic) |
| 5 | RTS | Gray | Flow control pin (3.3V to 5V logic) |
| 6 | Ground | Black | Ground connection |
Mini Connected to Flight Controller
For the successful integration of your Dronetag device with flight controller, only pin UART RX, UART TX and Ground must be connected. Not following the diagram below may permanently damage your device and void the warranty.
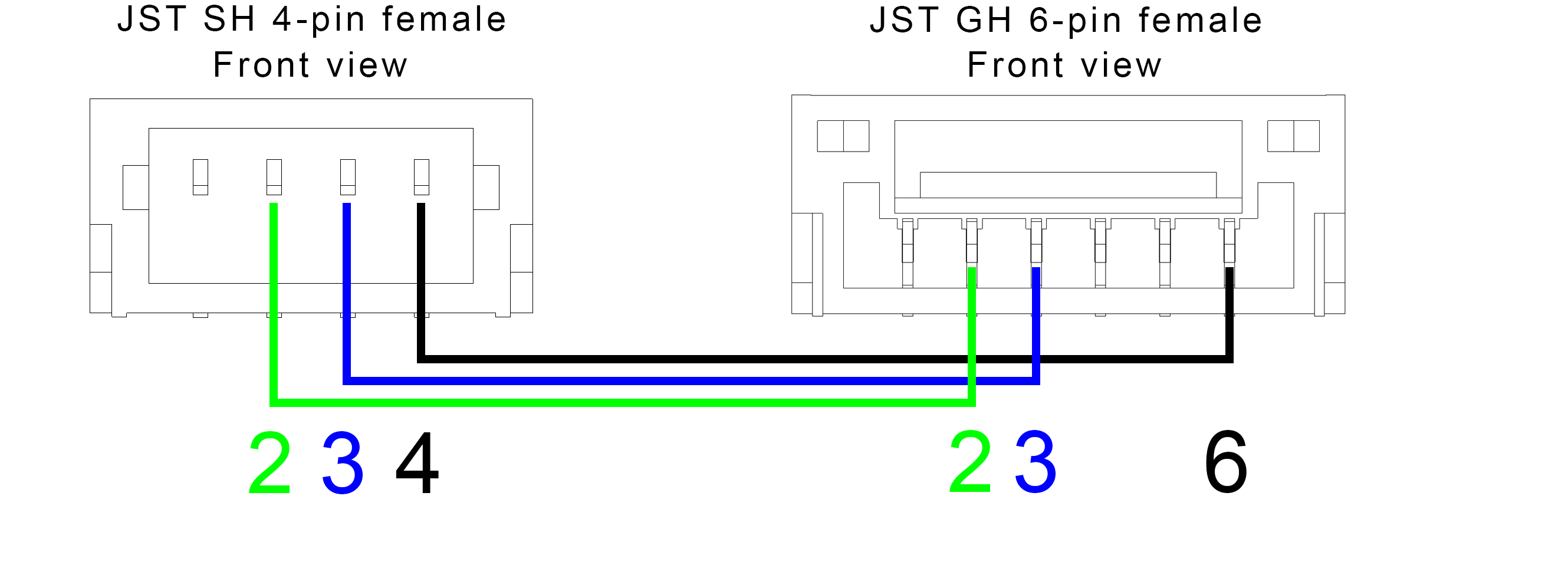
Danger
- Never put any voltage to pin 1 (VCC pin) on Dronetag Mini side.
- Always check that you wiring of UART TX/RX is as described above.
- Ground pin must be always connected.
Settings on the MAVlink Flight Controller
On the flight controller side, you must ensure that you selected following parameters on the UART/Serial port
- 115200 baudrate
- MAVlink 2 protocol
Using the MAVlink Data as Dronetag Input
Last step is to setup MAVlink as GNSS input and optionally as trigger for starting/ending the flight.
- Open up the Device Configuration
- Select MAVlink option as GNSS input. The internal GNSS receiver will turn off.
- If you want to have your flight state managed by the flight controller, enable MAVlink flight control option in General section
At this point, MAVlink data are read through Extension connector and broadcasted locally/send to Dronetag cloud. You can do a quick check if your integration was succesfull by disconnecting the Extension connector when you already have GNSS fix on your drone. GNSS LED which was previously green should turn into pulsing orange.
Caution
- Dronetag flight can be only started when your drone has GNSS fix.